存储分类
首先先看看模型计算过程中, 哪些过程需要被存储下来. 存储主要分为两大块:Model States 和 Residual States
Model States指和模型本身息息相关的,必须存储的内容,具体包括:
- optimizer states:Adam优化算法中的 momentum 和 variance
- gradients:模型梯度
- parameters:模型参数W
Residual States指并非模型必须的,但在训练过程中会额外产生的内容,具体包括:
- activation:激活值。在backward过程中使用链式法则计算梯度时会用到。有了它算梯度会更快,但它不是必须存储的,因为可以通过重新做Forward来算它。 activation 加速例子:
- 假设有一个激活函数 f(x) = sigmoid(x),其导数为 f’(x)。
- 在正向传播时,计算 a = f(x) 并存储 a。
- 在反向传播时,计算 f’(x)。如果存储了 a,则可以直接使用 a 来计算 f’(x),例如,如果 f(x) 是 函数,则 f’(x) = f(x) * (1 - f(x)),可以直接利用之前存储的f(x)来计算。
- 如果没有存储 a,则需要重新计算 f(x),然后才能计算 f’(x)。
- temporary buffers: 临时存储。例如把梯度发送到某块GPU上做加总聚合时产生的存储。
- unusable fragment memory:碎片化的存储空间。虽然总存储空间是够的,但是如果取不到连续的存储空间,相关的请求也会被fail掉。对这类空间浪费可以通过内存整理来解决。
接下来, 看看在不同的工程实现中, 采用不同的存储策略, 对内存、带宽、GPU等设备传输和计算有哪些影响。
模型并行(Model Parallelism)
当你有一个单卡装不下的大模型时,把模型分割成不同的层,每一层都放指定的GPU上. 此时,模型做一轮forward和backward的过程如下: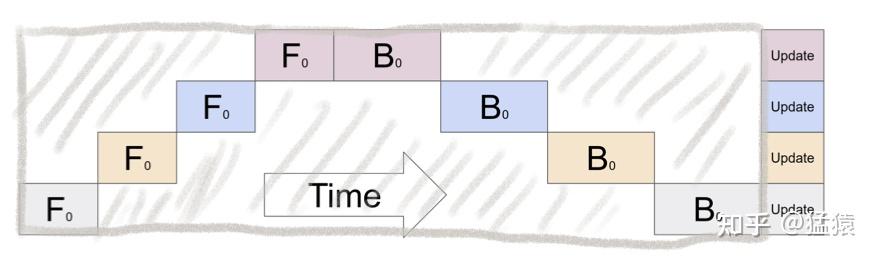
这样做确实能训更大的模型了,但也带来了两个问题:
1.GPU利用度不够。
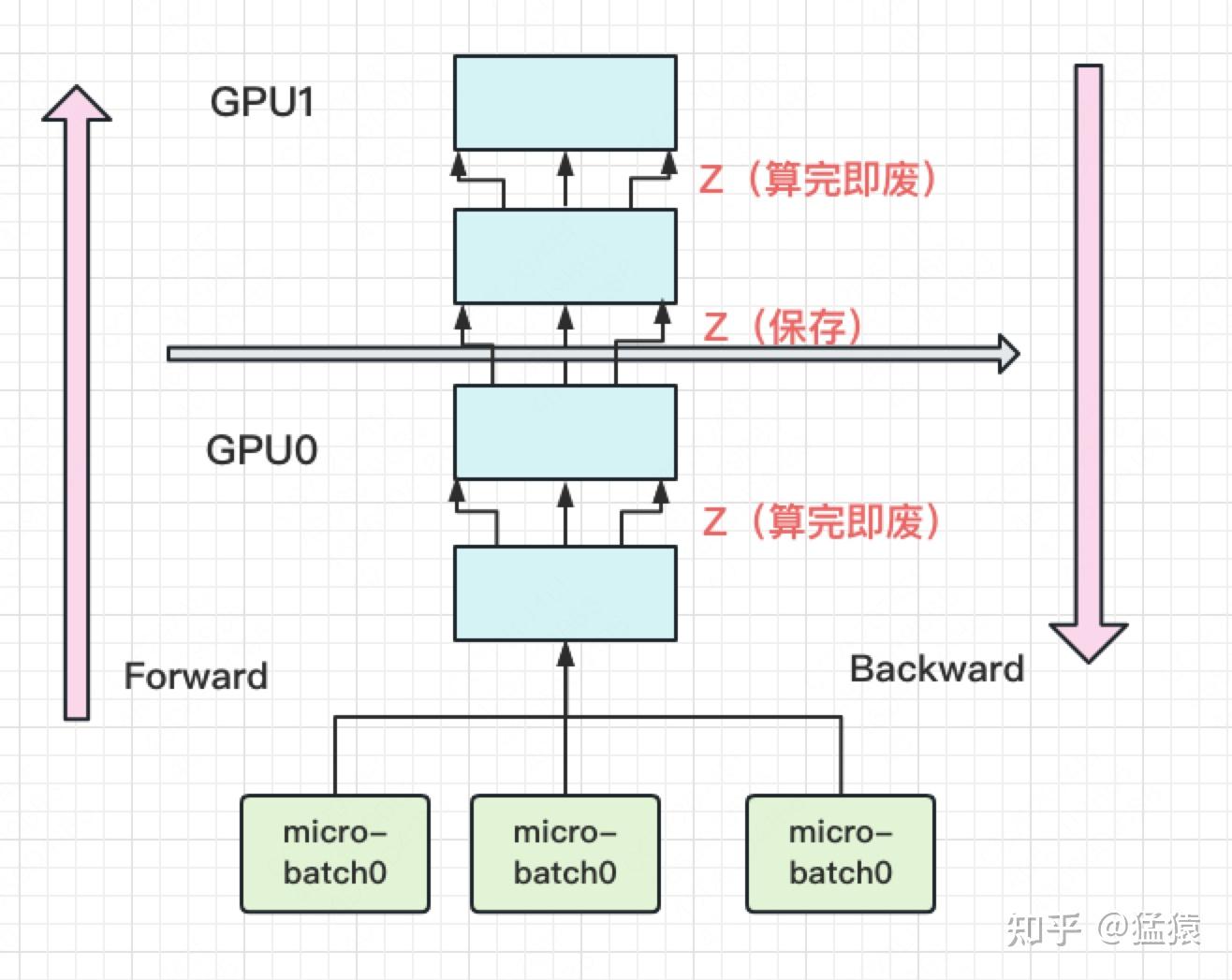
2.中间结果占据大量内存。在做backward计算梯度的过程中,我们需要用到每一层的中间结果z, 每一层的中间结果的保留随, 着模型的增大占据的显存也越大。
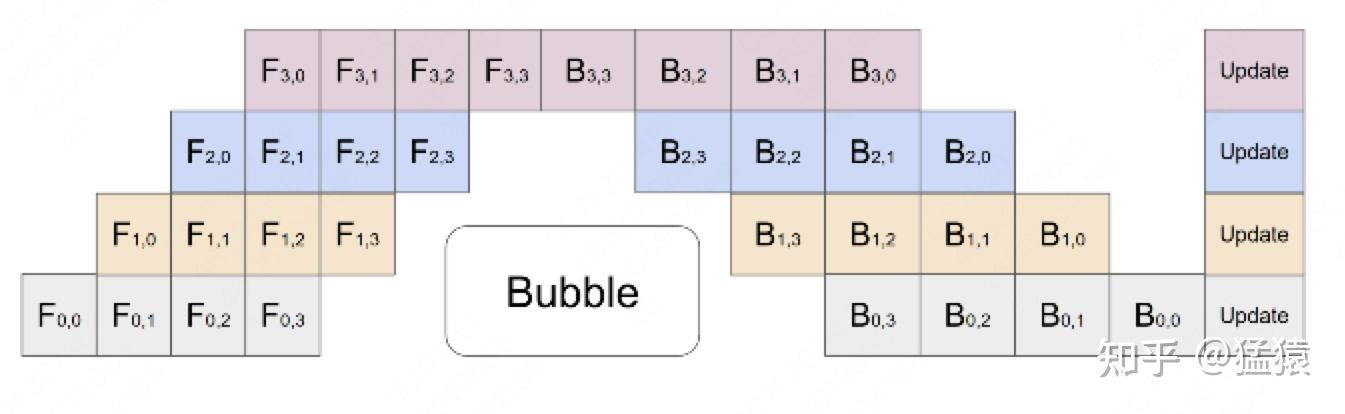
流水线并行(Pipeline Parallelism)
为了解决模型并行带来的问题, 而Gpipe提出了流水线并行. 流水线并行的核心思想是:在模型并行的基础上,进一步引入数据并行的办法,即把原先的数据再划分成若干个batch,送入GPU进行训练。未划分前的数据,叫mini-batch。在mini-batch上再划分的数据,叫micro-batch。
切分micro-batch
re-materalization(active checkpoint)
数据并行(Data Parallelism)
数据并行的核心思想是:在各个GPU上都拷贝一份完整模型,各自吃一份数据,算一份梯度,最后对梯度进行累加来更新整体模型。如下图所示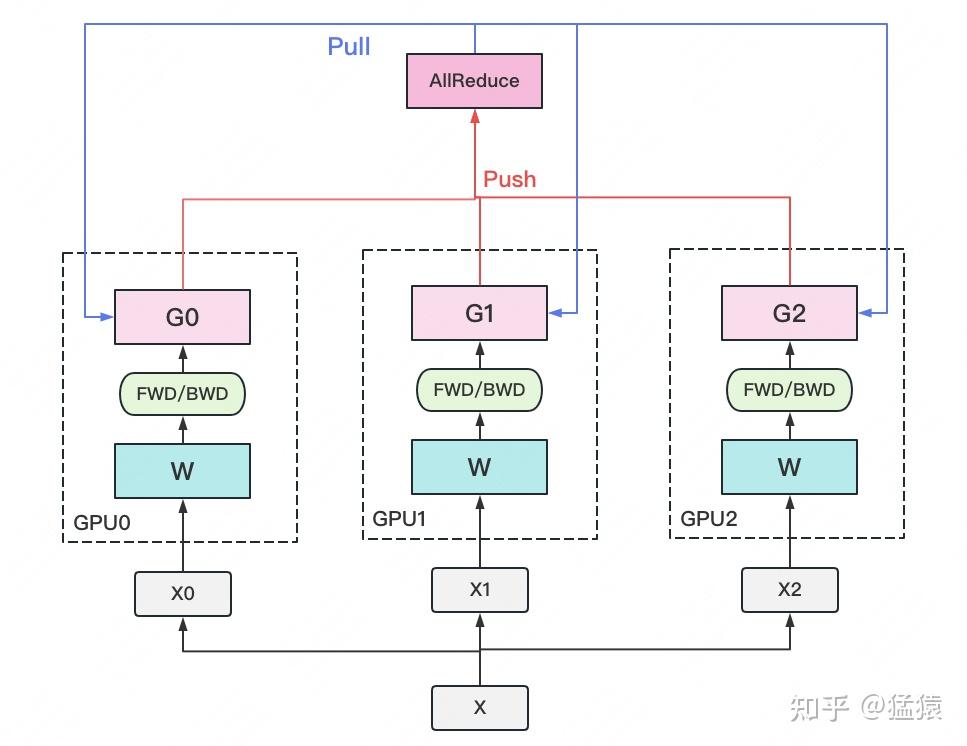
一个经典数据并行的过程如下:
1.在每块计算GPU上都拷贝一份完整的模型参数。额外指定一块GPU做梯度收集
2.把一份数据X(例如一个batch)均匀分给不同的计算GPU。
3.每块计算GPU做一轮Forward和Back Forward后,算得一份梯度 G。
4.每块计算GPU将自己的梯度push给梯度收集GPU,做聚合操作。这里的聚合操作一般指梯度累加。当然也支持用户自定义。
5.梯度收集GPU聚合完毕后,计算GPU从它那pull下完整的梯度结果,用于更新模型参数W。更新完毕后,计算GPU上的模型参数依然保持一致。
6.聚合再下发梯度的操作,称为AllReduce。
通讯瓶颈与梯度异步更新
实际操作中带来两个问题
存储开销大。每块GPU上都存了一份完整的模型,造成冗余。
通讯开销大。Server需要和每一个Worker进行梯度传输。当Server和Worker不在一台机器上时,Server的带宽将会成为整个系统的计算效率瓶颈。
受通讯负载不均的影响,DP一般用于单机多卡场景。
分布式数据并行(Distributed Data Parallel)
DDP首先要解决的就是通讯问题:将Server上的通讯压力均衡转到各个Worker上。 实现这一点后,可以进一步去Server,留Worker。
目前最通用的AllReduce方法:Ring-AllReduce, 它由百度最先提出,非常有效地解决了数据并行中通讯负载不均的问题,使得DDP得以实现。
Ring-AllReduce通过定义网络环拓扑的方式,将通讯压力均衡地分到每个GPU上,使得跨机器的数据并行(DDP)得以高效实现。
DDP把通讯量均衡负载到了每一时刻的每个Worker上,而DP仅让Server做勤劳的搬运工。当越来越多的GPU分布在距离较远的机器上时,DP的通讯时间是会增加的。
DeepSpeed ZeRO,零冗余优化
先看一下大模型训练的过程中,GPU都需要存什么内容。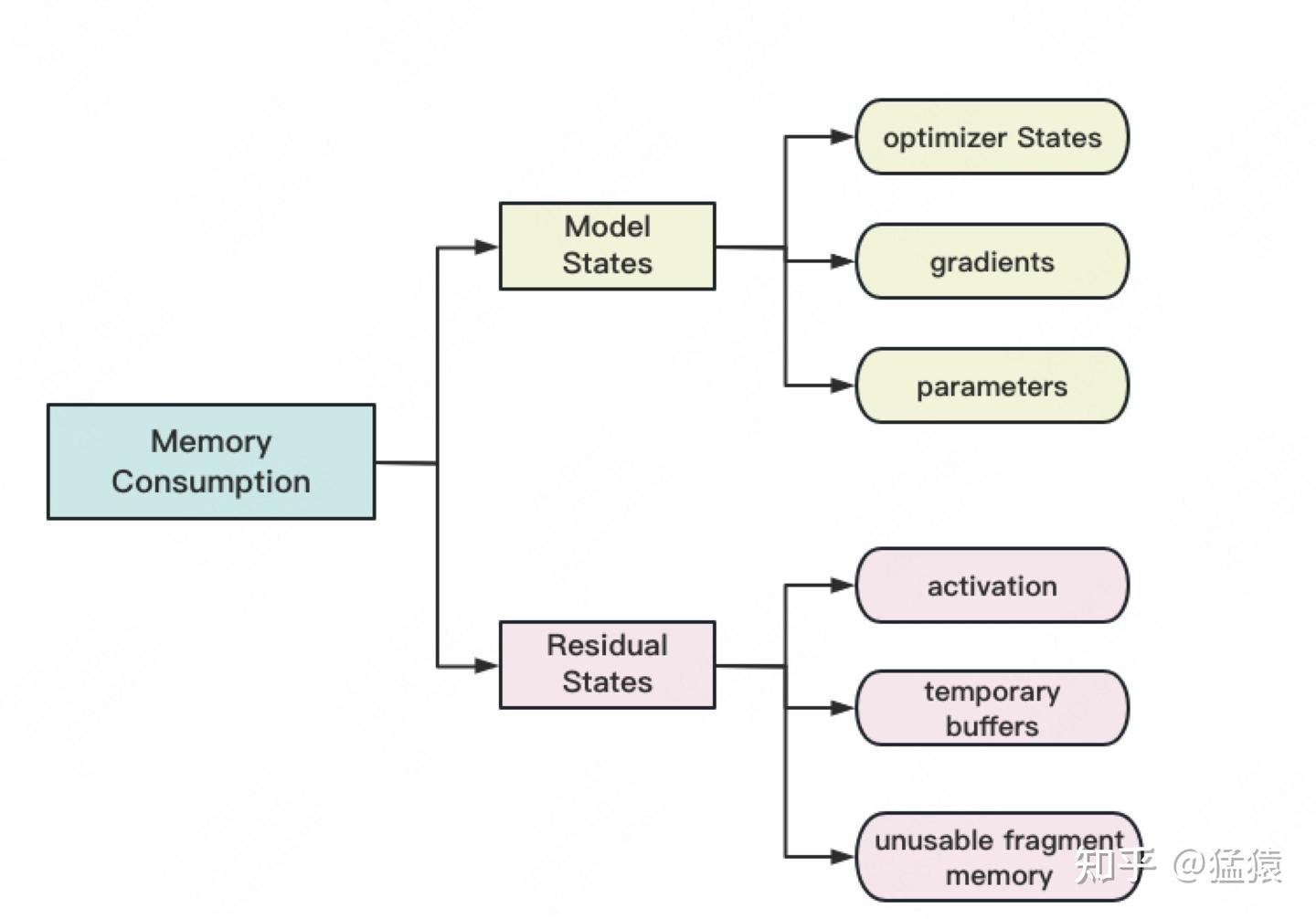
精度混合训练
在模型计算, forward和backward的过程中,fp32的计算开销也是庞大的。
那么能否在计算的过程中,引入fp16或bf16(半精度浮点数,存储占2byte),来减轻计算压力呢?
于是,混合精度训练就产生了,它的步骤如下图: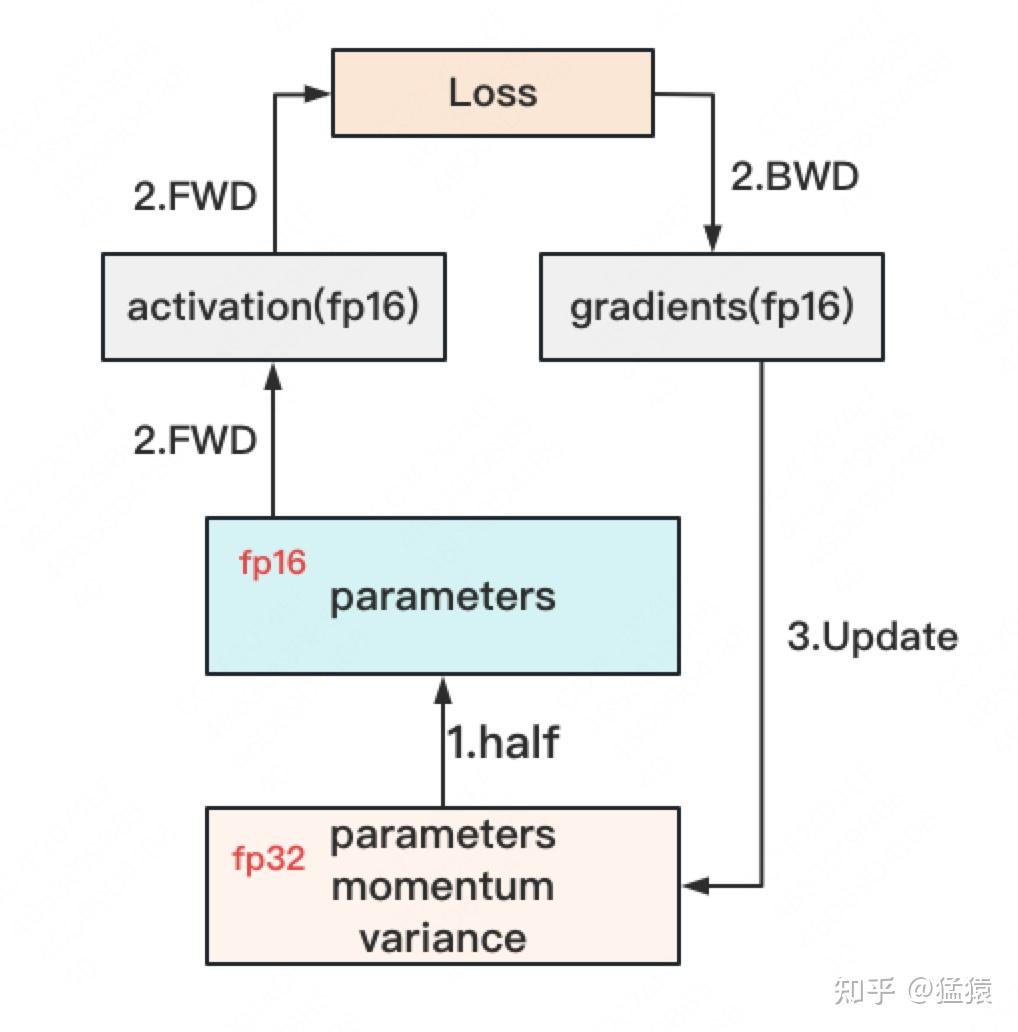
主要流程如下:
- 存储一份fp32的parameter,momentum和variance(统称model states)
- 在forward开始之前,额外开辟一块存储空间,将fp32 parameter减半到fp16 parameter。
- 正常做forward和backward,在此之间产生的activation和gradients,都用fp16进行存储。
- 用fp16 gradients去更新fp32下的model states。
- 当模型收敛后,fp32的parameter就是最终的参数输出。
通过这种方式,混合精度训练在计算开销和模型精度上做了权衡。